@wizz
It’s automatic and already there! Try it and you’ll see.
Icons are selected based on mode of transport, it’s going to be one of bus, metro, rail or ferry.
A New Chapter for MagicMirror: The Community Takes the Lead
Read the statement by Michael Teeuw here.
Read the statement by Michael Teeuw here.
Posts
-
RE: MMM-ResRobot - Public transport information for Sweden
-
RE: MMM-ResRobot - Public transport information for Sweden
@Advokaten
Do you mean that the name of the bus stop is misnamed on screen? Then you have to contact ResRobot to change it. -
RE: MMM-ResRobot - Public transport information for Sweden
@Advokaten
Strange, my mirror is running flawlessly. I’ll put in your config and see what happens. -
RE: MMM-ResRobot - Public transport information for Sweden
@MobbareKurtZ
By adding them as a comma-separated list, e.g.from: "12345,12346,12347", to: "54321,64321,74321"where each from and to pair specify an id for the departure and destination stops. If destination is not needed for a departure station, simply leave it empty like this:
from: "12345,12346,12347", to: "54321,,74321" -
RE: MMM-ResRobot - Public transport information for Sweden
@MobbareKurtZ
It all depends on the underlying ResRobot API but it sounds reasonable that ResRobot needs to know in what direction you are travelling.As the module only shows departures there is no need to specify a destination unless you want to limit the displayed departures to the ones going in that specific direction. In that case I would suggest to enter not the ultimate destination but rather the next “logical” stop such as point of transit between modes of transport.
-
RE: 3 tries 3 fails Raspberry b+
@infamoustiggr
I didn’t fiddle that much with the mirror pi. But ahead of that I’ve been doing quite some fiddling with Pis in general so I didn’t start from scratch.To help you with troubleshooting:
After installing DietPi and rebooting you are presented with the dietpi-software screen:
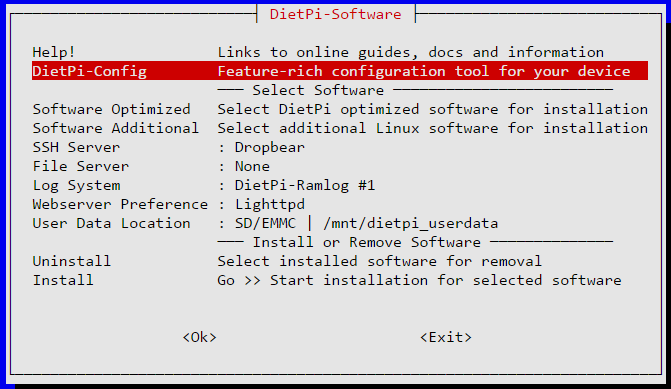
Look under “Software Optimized” and “Software Additional” and make sure that NONE of the options are selected, you want an install that is as clean as possible.
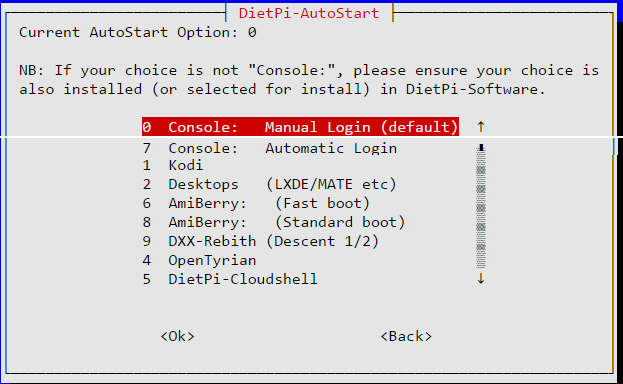
Under DietPi-Config make sure that Autostart is set to option 0 (default):
Change directory to /root and install MagicMirror according to instructions in the README.
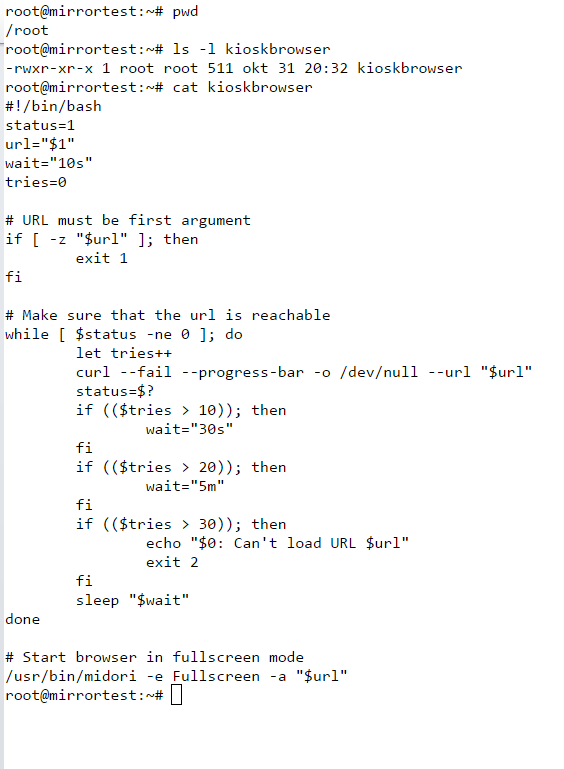
Following my instructions above to install all systemd scripts and their helpers. My /root contains the following:
Stop magicmirror service (just to make sure it isn’t running) with the command:
systemctl stop magicmirror.serviceStart the magicmirror interactively by running
node serveronlyfrom the MagicMirror directory. You should see something similar to this:root@mirrortest:~/MagicMirror# node serveronly Starting MagicMirror: v2.1.1 Loading config ... Loading module helpers ... No helper found for module: alert. Initializing new module helper ... Module helper loaded: MMM-Remote-Control No helper found for module: clock. Initializing new module helper ... Module helper loaded: calendar Initializing new module helper ... Module helper loaded: MMM-WunderGround Initializing new module helper ... Module helper loaded: newsfeed Initializing new module helper ... Module helper loaded: MMM-ResRobot Initializing new module helper ... Module helper loaded: MMM-NetworkScanner All module helpers loaded. Starting server op port 80 ... Server started ... Connecting socket for: MMM-Remote-Control Starting node helper for: MMM-Remote-Control Connecting socket for: calendar Starting node helper for: calendar Connecting socket for: MMM-WunderGround MMM-WunderGround helper started ... Connecting socket for: newsfeed Starting module: newsfeed Connecting socket for: MMM-ResRobot Starting node_helper for module: MMM-ResRobot Connecting socket for: MMM-NetworkScanner Starting module: MMM-NetworkScanner Sockets connected & modules started ... Ready to go! Please point your browser to: http://localhost:80If any errors are shown, investigate them.
Now that MagicMirror is running it’s time to move on to the browser part.
Stop MagicMirror with ctrl+C and start the service withsystemctl start magicmirror.service.Make sure browser and matchbox are stopped by running the commands:
systemctl stop kioskbrowser.service systemctl stop matchbox.serviceStart matchbox with the command
systemctl start matchbox.service. Check that it started ok withsystemctl status matchbox.service. If not investigate.Once you get this far the “only” thing left to check is the midori browser. As you don’t have an X Display on the console it is slightly trickier. Let me know if/when you made it this far and we’ll take it from there.
-
RE: 3 tries 3 fails Raspberry b+
@johnnyboy
That’s technology development for you. Of course, in this case @infamoustiggr has the luxury of having someone with the exact same equipment already having the solution running.As to the speed issue, apart from taking a few extra seconds on boot, I have no issues whatsoever with speed for functionality on my Pi 1. But I must admit it took me a number of tries to get there! Doing it with little to no experience with Linux is really tough.
-
RE: 3 tries 3 fails Raspberry b+
@johnnyboy
Of course you could always buy a Pi 3 and not worry, but what’s the fun in that? It’s much more rewarding to make it run on a Pi 1! :-)@infamoustiggr
The first rule of troubleshopting is to eliminate all things that ARE working! What’s left must be the error.I would start with running all commands from the shell, i.e. do not create the systemd scripts, rather run the respective commands from the shell bybtyping them in, that way you will get feedback from each command.
The error messages you post do not have any context so it’s hard to know when they occur. From where did you cut the errors?
When installing raspbian or dietpi you should NOT install X or any desktop environment, the relevant packages will be installed when you install the other components.
-
RE: MMM-ResRobot - Public transport information for Sweden
@albertc
Not right now. This was a conscious decision on my part as the mirror updates fairly seldom. relative departure times would be showing the wrong info after one minute. -
RE: MMM-ResRobot - Public transport information for Sweden
One thing popped into my mind: the Pi 1 is much slower than a Pi 3 and loading all the modules takes quite some time. Could it be that you are trying to open midori before MagicMirror has loaded all the modules and therefore is refusing connections? That in itself was the reason I had to go with a script that checked that midori was listening before launching MagicMirror.
Have you checked with journalctl that magicmiror is ready for action?
-
RE: MMM-ResRobot - Public transport information for Sweden
@FallandeGubbe
Maybe a stupid quesrion but did you run npm install after cloning the repository? -
RE: MMM-ResRobot - Public transport information for Sweden
@FallandeGubbe,
I’m running it on a Raspberry Pi 1 B with 256MB so yes, it’s possible… :-)You can’t run MagicMirror out of the box but I wrote a post in another thread about it:
[https://forum.magicmirror.builders/topic/1659/3-tries-3-fails-raspberry-b/13] -
RE: MMM-ResRobot - Public transport information for Sweden
@Klzow,
I’ve uploaded a new version of the module. It has a new config option, skipMinutes, which allows you to skip departures occuring within skipMinutes from now. Feel free to try it out. -
RE: Cast from Server
You can get this to work if you create a custom receiver for the Chromecast. A bit more work but definately doable.
More info here:
https://developers.google.com/cast/docs/custom_receiver -
RE: 3 tries 3 fails Raspberry b+
@infamoustiggr, thanks!
Just make sure sure to pay it forward if you have the opportuniy to help someone else here in the forums. -
RE: 3 tries 3 fails Raspberry b+
Installed packages
If you are running dietpi or Raspbian Jessie systemd should already be installed. Otherwise you need to install and enable it. Google is your friend.Midori should also be installed but Matchbox most likely isn’t. Install it with:
sudo apt-get install matchbox-window-managerSystemd
The systemd scripts are all located in /etc/systemd/system. To create magicmirror.service enter the following command (I’m using the editor nano):sudo nano /etc/systemd/system/magicmirror.servicePaste script from above and edit to suit your needs.
Make the script executable with the following command:
sudo chmod +x /etc/systemd/system/magicmirror.serviceRepeat these steps for the other scripts by replacing magicmirror.service with the appropriate name.
Custom script
For DietPi the scripts are located in /root and for Raspbian they are located in /home/pi. Change to the appropriate directory with cd.nano kioskbrowserPaste the code from above and save/exit
Make the script executable by running:chmod +x kioskbrowserMagicMirror config
Make sure that MagicMirror has the correct port set in config.js. (Look for “port”: in config/config.js and make sure it is set to 80. Otherwise modify kioskbrowser.service and change the url http://localhost to http://localhost:port where port is the port number of MagicMirror.)Scheduled on/off times
If you’re like me and do not want your mirror active during the night you can either use a module such as MMM-ModuleScheduler or a cron script that turns the monitor power on/off at set times. I use the latter. To do that you enter the command:crontab -eand paste the following lines
59 05 * * * /usr/bin/vcgencmd display_power 1 09 23 * * * /usr/bin/vcgencmd display_power 0Exit and save.
The first line turns the monitor ON at 05:59 and the second line turns if OFF at 23:09. Modify according to needs.Reboot your pi and enjoy!
-
RE: Help with config file
The position line for the clock module is also wrong, it should be like this:
position: "top_left",I recommend that you use a lint tool (e.g. eslint) to do syntax checking. It will find most of the errors.
-
RE: Help with config file
@sullivnc
There is a curly brace missing in the config field of the clock module. -
RE: 3 tries 3 fails Raspberry b+
Hi all,
I’m running my mirror on an original Pi B 256MB with no issues at all!The Raspbian version I use is DietPi which is really great on a 256MB Pi. Note that the standard user in DietPi is “root” rather than “pi”. If you use standard Raspbian just replace all occurences of “root” with “pi” in the scripts below.
As the documentation states you start off with installing the Server Only option. If I remember correctly I had to manually install many of the node module dependencies as they weren’t installed correctly otherwise
I use matchbox as the window manager because it suited my needs best. It uses less resources which again is great for a 256MB Pi.
I’m using systemd scripts rather than pm2 as I think they work better. My scripts:
magicmirror.service:
[Unit] Description=Node.js Magic Mirror Server [Service] ExecStart=/usr/bin/node /root/MagicMirror/serveronly/index.js WorkingDirectory=/root/MagicMirror Restart=always RestartSec=20 StandardOutput=syslog StandardError=syslog SyslogIdentifier=nodejs-magicmirror Environment=NODE_ENV=production PORT=1337 [Install] WantedBy=multi-user.targetmatchbox.service:
[Unit] Description=X11 After=X.service [Service] Environment=DISPLAY=:0.0 ExecStart=/usr/bin/matchbox-window-manager -use_titlebar no -use_cursor no User=root Restart=on-failure [Install] WantedBy=multi-user.targetKioskbrowser.service:
[Unit] Description=Kiosk Browser After=matchbox.service magicmirror.service Requires=magicmirror.service [Service] WorkingDirectory=/root/MagicMirror User=root Environment=DISPLAY=:0.0 # Don't activate screensaver ExecStartPre=/usr/bin/xset s off # Disable DPMS (Energy Star) features ExecStartPre=/usr/bin/xset -dpms # Don't blank the video device ExecStartPre=/usr/bin/xset s noblank ExecStart=/root/kioskbrowser http://localhost Restart=on-failure [Install] WantedBy=multi-user.targetNote that the kioskbrowser service relies on a user script called /root/kioskbrowser. This script has some extra logic to avoid the initial white screen when midori has loaded but not fetched any magic mirror content. The script perform a curl call to see if the magic mirror module is responding. If not it waits for a few seconds and then tries again. Once the magic mirror responds it starts midori in fullscreen mode.
/root/kioskbrowser:
#!/bin/bash status=1 url="$1" wait="10s" tries=0 # URL must be first argument if [ -z "$url" ]; then exit 1 fi # Make sure that the url is reachable while [ $status -ne 0 ]; do let tries++ curl --fail --progress-bar -o /dev/null --url "$url" status=$? if (($tries > 10)); then wait="30s" fi if (($tries > 20)); then wait="5m" fi if (($tries > 30)); then echo "$0: Can't load URL $url" exit 2 fi sleep "$wait" done # Start browser in fullscreen mode /usr/bin/midori -e Fullscreen -a "$url"Hope this helps.
-
RE: MMM-ResRobot - Public transport information for Sweden
@Klzow,
That shouldn’t be too hard to do. I will look into it. My current thinking is to introduce a new config value (something like “ignoreBefore=5” with default 0 for backward compatibility) Keep an eye on this thread for developments!